История кафедры
Кафедра была основана в 1972 году. Первым ее заведующим был известный математик и механик Вадим Васильевич Стрыгин, ученик выдающегося ученого Марка Александровича Красносельского. Некоторое время кафедру возглавлял механик Владислав Владимирович Колокольчиков.
С 1990 года кафедрой руководит профессор Владимир Андреевич Соболев.
Телефон кафедры: 334-54-38
Заведующий кафедрой, д.ф.-м.н., профессор Соболев Владимир Андреевич
Горелов Юрий Николаевич - д.т.н., профессор
Щепакина Елена Анатольевна- д.ф.-м.н., профессор
Воропаева Наталия Владимировнак - к.ф.-м.н, доцент
Горелова Елена Яковлевна - к.ф.-м.н, доцент
Карпухин Юрий Павлович - к.ф.-м.н, доцент
Щетинина Екатерина Владимировна - к.ф.-м.н, доцент
Китаева Елена Викторовна - к.ф.-м.н, доцент
Видилина Ольга Викторовна - к.ф.-м.н, доцент
Голодова Елена Сергеевна - к.ф.-м.н,ст. преподаватель
Карпухина Мария Игоревна - ассистент
Кафедра сегодня
Студенты направлений, «Математика», «Прикладная математика», «Фундаментальная математика и механика» получают подготовку в рамках специализаций по математическому моделированию.
На кафедре работают 3 доктора наук, 10 кандидатов наук. Наши научные интересы лежат в сфере теории дифференциальных уравнений и математической теории управления и решении задач качественного, асимптотического и численного анализа и управления для систем твердых тел и гироскопов, химической кинетики, физики горения и взрыва, экономической динамики, биофизики и динамики популяций, динамики лазерных систем и др.
Сотрудники кафедры регулярно выигрывают российские и международные гранты на поддержку научных исследований, наши монографии печатают такие престижные издательства, как «Наука» и SIAM (США). Научно-исследовательская лаборатория «Моделирование процессов управления и обработки информации» при кафедре, которой руководит д.т.н., профессор Юрий Николаевич Горелов, лидирует по объемам финансирования научно-исследовательских и научно-технических программ, результаты которых широко применяются в конструкторских и производственных организациях космического профиля.
Преподаватели кафедры регулярно приглашаются для чтения лекций и проведения совместных исследований в различные университеты и исследовательский учреждения, в течении последних лет выезжали в Бельгию, Великобританию, Израиль, Ирландию, Португалию, США, Францию, Испанию.
На кафедре работает аспирантура по специальностям:
"Моделирование процессов управления и обработки информации" при кафедре дифференциальных управлений и теории управления
Научный руководитель лаборатории:
Горелов Юрий Николаевич, доктор технических наук, профессор кафедры дифференциальных уравнений и теории управлени
Заведующий лабораторией:
Горелова Ольга Ивановна, кандидат технических наук
Телефоны: (846)-334-54-38 (каф.), 335-86-75 (лаб.)
E-mail: gorelov@archive.samsu.ru
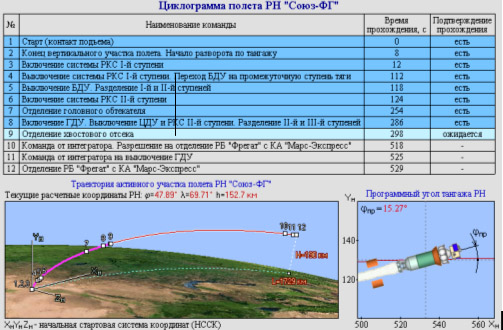
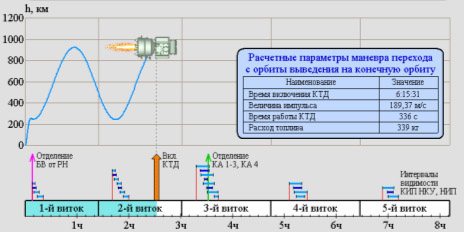
1. Разработаны специализированные программные комплексы информационного сопровождения:
На этапе выведения КА на орбиту моделируются параметры траектории полета и текущей ориентации РН, ход выполнения циклограммы полета РН с учетом репортажных сообщений, поступающих с места запуска. Предусмотрено отображениеопераций разделения ступеней, включения и выключения двигателей РН, сброса головного обтекателя, отделения хвостового отсека, отделения полезной нагрузки.

Разрабатывается программный комплекс отображения в реальном времени фактических параметров движенияи текущих характеристик основных систем и агрегатов РН «Союз-2» на основе поступающей телеметрической информации.
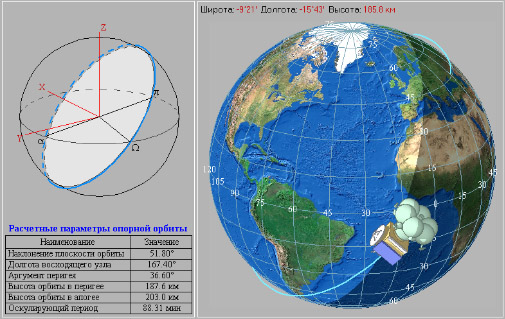
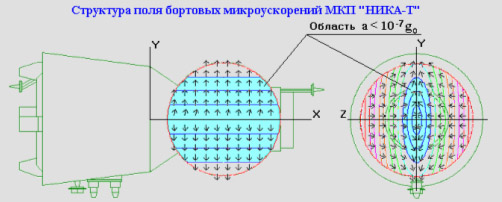
2. Разработана математическая модель и программный комплекс моделирования поля квазистатических (низкочастотных, порядка орбитальной частоты) бортовых ускорений для низкоорбитальных микрогравитационных космических платформ (МКП) типа «Фотон», «Бион» или проектируемой МКП «НИКА-Т»; на основании изучения эволюции структуры поля микроускорений введены его основные характеристики (полюс поля, размеры и ориентация реперного изогравиэллипсоида – области с уровнем ускорений не более 10-6g0, где g0 = 9,81 м/с2).
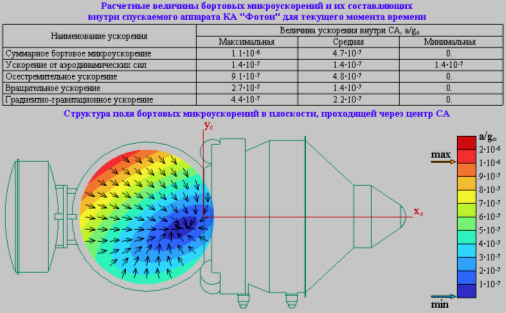
Исследована задача восстановления основных характеристик и значений поля микроускорений МКП (в произвольных точках ее внутреннего объема или рабочих зон технологических установок) по измерениям бортовых ньютонометров (акселерометров).
Впервые поставлена и решена методом динамического программирования задача оптимального управления бортовыми микроускорениями в заданной точке внутреннего объема МКП (на интервалах от нескольких десятков минут до нескольких витков); установлена структура оптимальных периодических плоскопараллельных режимов ориентации МКП.
Экспериментально установлены (методом математического моделирования) и теоретически обоснованы эффекты устойчивости изогравиэллипсоидов и взаимной компенсации отдельных компонент бортовых микроускорений при постоянной ориентации МКП в орбитальной системе координат.
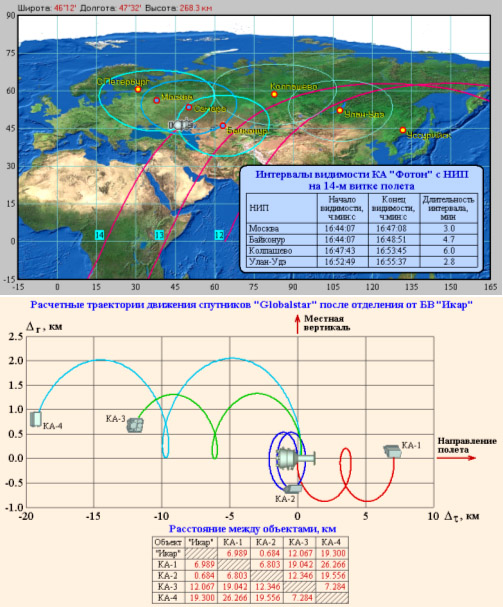
Обоснованы схемы полета КА "Фотон-М" с использованием пассивных методов ориентации, в том числе – в режиме градиентно-гравитационной стабилизации.
3. Разработан программный комплекс моделирования, предназначенный для синтеза программ управления угловым движением КА дистанционного зондирования Земли (типа «Ресурс-ДК»)в режиме высокоточного сканированиярайоновзондированияиоперативногоанализа характеристик сканирования.
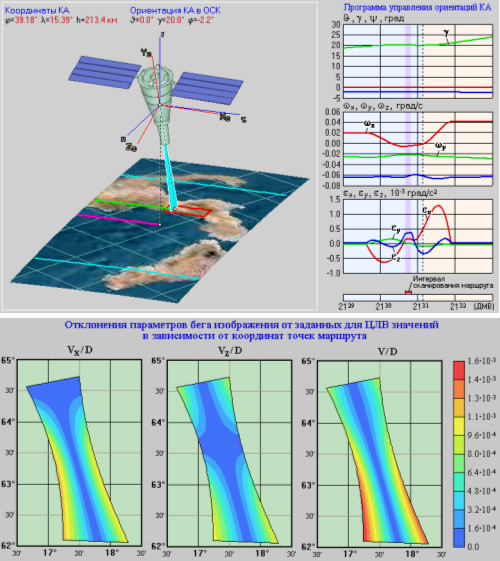
Разработана методика оперативного планирования работы КАдистанционного зондирования Земли на длительных временных интервалах при интенсивном потоке потенциальных районов зондирования, набегающих вдоль трассы полета.
На основе формализма А.И.Лурье разработаны методики проектного анализа динамических схем упругих КА.
Разработаны математические модели КА с присоединенными упруго-деформируемыми элементами (панели солнечных батарей, антенные устройства и т.п.); предложен критерий применимости конечномерных математических моделей упругих КА.
Разработаны теоретические основы локально-автономного управления динамическими системами с распределенными параметрами; для упругих КА и крупногабаритных космических конструкций сформулирован "принцип квазизатвердевания" как универсальный принцип управления движением таких объектов, имеющих существенно ограниченные пространственные базы управления и измерения.
Научный руководитель лаборатории «МПУ и ОИ», профессор кафедры дифференциальных уравнений и теории управления, доктор технических наук Горелов Юрий Николаевич окончил Куйбышевский авиационный институт им. акад. С.П.Королева. С 1976г. работал в Центральном специализированном конструкторском бюро, с 1979г. - в НИГ «Динамика полета» кафедры динамики полета и системы управления КуАИ. С 1981г. учился в аспирантуре КуАИ (научные руководители - проф. Бочкарев А.Ф., проф. Титов Б.А.) и в 1984г. защитил кандидатскую диссертацию в ЛИАП.В 1984-1990гг. - ассистент кафедры теоретической механики и теории машин и механизмов КуАИ, а с 1991г. - с.н.с. НТЦ «Наука». В 1992г. поступил в докторантуру СПбГУАП (научный консультант - проф. Синяков А.Н.)и в 1996г. защитил там докторскую диссертацию по специальности системы обработки информации и управления (на тему - разработка теоретических основ проектирования локально-автономных регуляторов систем управления движением упруго-деформируемых систем).
С 1997г. работает в СамГУ профессором кафедры дифференциальных уравнений и теории управления механико-математического факультета.
Преподаваемые дисциплины: Теория управления; Основы математического моделирования; Математические модели экономики.
Область научных интересов: математическая теория управления, теория оптимального управления, динамика и управление движением упругих КА, математическое моделирование процессов управления.